![]()


机器人视觉应用

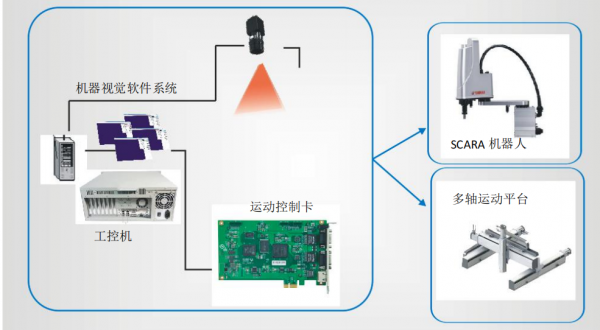
机器人视觉引导系统是一套专门用于引导工业机器人精确抓取、放置、贴合的视觉系统.可为多种国内外品牌机器人提供视觉引导系统解决方案。
适用场景

功能介绍
识别和确定目标物位置,引导机械手进行准确的拾取;高
精度的定位,引导机械手进行精确对位。
操作简单;
保持高精度和重复精度;
自动寻找特征;
精准放置到装配和加工位置;
机器人手臂安装相机和固定安装相机两种方式

应用案例-1
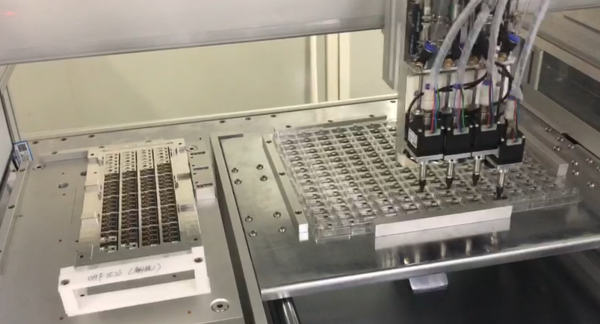
CCD视觉引导6轴机器人定位抓取

◇ 系统构成:
相机:2个 像素:1000w 精度:±0.03mm 机器人:单臂6轴
从入料处放入空料盘,当料盘到达机器人取料位置后,会通知机器人,然后机器人会将治具中检测完的料,依次放入料盘,然后流到 FCT 工位进行检测操作

应用案例-2
CCD视觉引导4轴机器人定位贴合

本系统四个工位每个工位采用5个相机定位产品的角边,背光源照亮产品,依次检测膜材和半成品的位置,进行精确定位,根据产品位置的变化,计算出偏移量,将偏移量传送给机械臂(YAMAHA),移动校正,实现贴合.
◇ 系统构成: 相机:20个 像素:600w 精度:±0.05mm 机械臂:YAMAHA四轴
应用案例-3
CCD视觉引导4轴机器人定位贴合


检测针间距检测,针弧度个数,定位底部两个角点定位,计算位置信息,发送位置给指定机械设备。
◇ 系统构成: 相机:1个 像素:1000w 精度:±0.15mm 机械臂:四轴机械臂
巨力方视觉
专注机器视觉解决方案

深圳市巨力方视觉技术有限公司是一家专业做视觉、激光等光运用技术为核心的自动化检测公司,公司主要经营机器视觉系统集成、激光测量系统集成、运动控制系统集成等系统解决方案。以研发、设计、制造、销售和技术服务于一体的经营模式,为自动化行业提供优质精准的自动化解决方案。
欢迎咨询:0755-23022156
 在线咨询
在线咨询