![]()

项目名称:手机摄像头玻片定位贴合视觉系统

硬件配置:
序号 | 项目 | 参数 |
1 | 工控机 | I5-3 |
2 | 相机 | 1000W |
3 | 镜头 | 16mm |
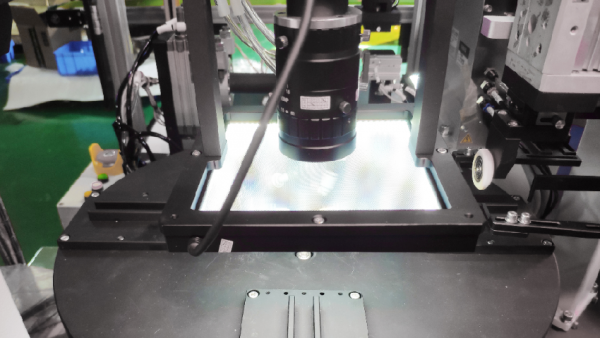
4 | 光源 | 同轴光 |
5 | IO卡 | PCI1230 |
6 | 精度 | ±0.05mm |
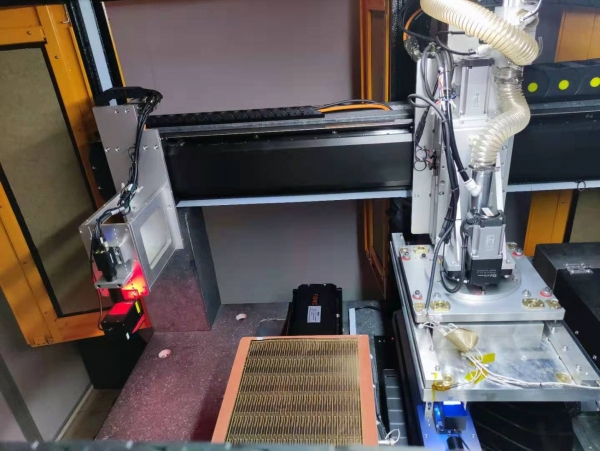
膜片平放在膜片平台,左相机工位抓取一片玻璃到拍照点拍照,右相机工位移动到第一片膜片位置拍照,结合左右两边拍照数据将玻璃贴在玻璃平台上,重复上述流程贴完21片后,翻板翻转到贴合位,玻璃平台上顶完成贴合。
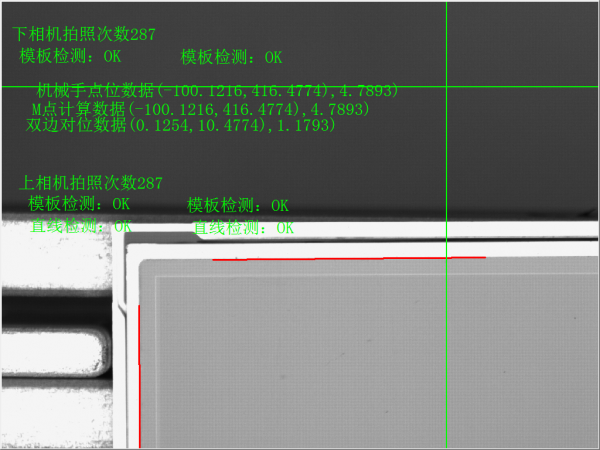
右相机工位:右运动机构负责依次拍摄黑色膜片的位置和角度 ,相机从上往下拍摄,相机安装在运动机构上,每拍摄一个黑色膜片,将位置角度发送给左相机工位的运动机构,再移动相机拍摄下一个黑色膜片。
左相机工位:相机从下往上拍摄,左运动机构吸取一个白色的玻璃片,到固定的拍照点拍摄,计算角度和位置偏移量,结合右相机工位发送的黑色膜片的角度和位置,贴合在黑色膜片旁边的膜材上。
黑色膜片和白色玻璃片呈对称关系一一对应,一版产品有3*7共21个黑色膜片,最后工艺需要将贴合好的黑色膜片和白色玻璃片对折以完成黑白的重叠贴合。

图3-1 贴合示意图
1. 贴合时左侧运动机构没有直接将玻璃贴合在膜片上,需要将翻板翻转180度后上顶完成贴合,对机构翻转精度以及上顶精度要求高。
2. 两侧共有两组运动机构配合完成贴合,标定时左右分开单独标定,由于两侧运动机构不是绝对平行垂直,进行多点贴合时两个坐标系之间角度容易造成最终贴合效果呈角度放大或减小的趋势(如下图4-1所示)。

图4-1 坐标系角度差异贴合效果
3. 左相机固定,右相机随机械手运动,进行多点贴合,这时双边对位中右相机的拍照位置为变量,需要将实际机械位置加入到相机坐标转换机械坐标单元中。
4. 由于不是直接贴合在目标膜片上,要想翻转后玻璃与膜片重合,玻璃的平台与膜片平台有一个固定的相对位置,需要后续调试中进行确定。
先对左右两相机进行标定。
(1) 右相机为移动多个位置拍照,此时需要提前确定右相机的机械移动拍照位置。
(2) 选择“右相机”流程,双击“数据采集”,勾选“连续采图”,实时显示相机图像,打开右侧相机光源。

图5-1 数据采集
(3) 将膜材放置在硅胶台中央,操作plc面板移动模组到右上角第一个产品,将产品置于视野中心位置,记录好此时模组的XY坐标,再移动模组到左下角最后一个产品,将产品置于视野中心位置,记录好此时模组的XY坐标。注意该位置确定后,后续正常贴合时膜片放置的位置应该大致与此时的位置相同,最好做好相应标记,方便下次正确放置膜片。
(4) 双击“2D点数组-拍照坐标”,点击“清空”按钮清空数组中的坐标,在下图5-2所示红框1中输入记录的第一个模组XY坐标,点击“添加”按钮加入到数组中,相同方法输入第二个模组XY坐标添加到数组中。
(5) 点击“阵列”按钮打开阵列窗口,鼠标先点击数组中添加的第一组数据,再点击阵列窗口中起点右侧的读取按钮,鼠标点击数组中添加的第二组数据,再点击阵列窗口中终点右侧的读取按钮,然后在阵列窗口中输入膜片上产品的行数和列数,最后点击“生成阵列”,退出,再点击“排序”按钮,在弹出窗口中再点击排序,退出全部窗口即可。
(6) 注意在下图5-2中红框4处更改数组大小,数组大小要大于拍照坐标阵列的数量,即膜片数量。

图5-2 阵列拍照坐标
(1) 右相机计算完产品中心数据后,需要将相机坐标转换为机械坐标,而相机为多位置移动拍照,此时需要将拍照位置的机械坐标加入到坐标系转换中。如下图5-3所示,将拍照位置的坐标索引出来,在“标定变换”单元中的拍照位置(机械坐标)更改为索引当前拍照位置的机械坐标。

图5-3 标定变换
(2) 运用“函数运算”单元,将标定变换后的XY值加上一个数值(该数值为玻璃平台与膜片平台固定的相对位置)得到的最终结果作为双边对位的参考点坐标。
(3) 先贴合一张,结合贴合效果更改玻璃平台与膜片平台固定的相对位置值,以贴合出的产品没有明显错位为准。
(4) 4.坐标系角度补偿
(5) 偏差有两个方向,第一个方向:沿X轴方向Y值偏差越来越大,第二个方向:沿Y轴方向X值偏差越来越大.

图5-4 坐标系角度差异贴合效果
(1) 以第一片贴合数据为基准,对坐标系角度造成的偏差进行额外补偿。由于右相机标定变换已经加入了每次机械坐标值,“双边对位”单元输出的偏移量也随右相机的拍照位置变化。以补偿Y轴方向上的误差为例,计算公式如下:

图5-5 函数运算
可以通过补偿坐标系角度θ值大小改变补偿量,如图5-6所示。

图5-6 坐标系角度补偿值
(2) 以通过计算后的补偿值,加上双边对位的偏移量输出得到最终的偏移量发送给左运动机构执行贴合动作。
 在线咨询
在线咨询