



激光测量分类
激光测量分为两种。
第一种:激光位移传感器(点激光测量);
第二种:2D&3D激光轮廓仪(线激光测量)。

行业应用:
- 机械加工/制造/自动化
- 玻璃/平板/电池板
- 半导体/集成电路
- 医疗器械/生物医药
- 橡胶/造纸/塑料
- 精密机械
- 等等...
激光位移传感器(点激光)
激光位移传感器凭借直径小的测量光斑,可从较远距离对被测物体进行测量,并适用于结构小巧德零部件进行测量。传感器相对于被测表面安装距离远且量程较大德技术特性,使其可完成对特殊表面的测量任务,如炙热的金属表面。传感器与被测物体间在测量过程中无实际接触,此非接触式测量原理的优势在于可保证无磨损,抗干扰的高精度测量。此外,激光三角反射式测量原理还适用于高精度,高分辨率的高速测量。
传感器探头到被测物体的距离可以由三角计算法则精确得到。采用这种方法能够得到微米级的分辨率。根据不同型号,测量得到的数据会由外置或内置控制器通过多种接口进行评估。

采用激光三角反射式测量方法的好处:
- 非接触、无磨损
- 测量光斑小
- 允许较大安装距离
- 较大的量程
- 几乎可以测量任何被测物体材料
点激光应用范围
应用范围:
等高,间隙,外轮廓,厚度,高度,深度,边沿,凹槽,角度,圆度,平整度,变形等高精度测量。

结构:

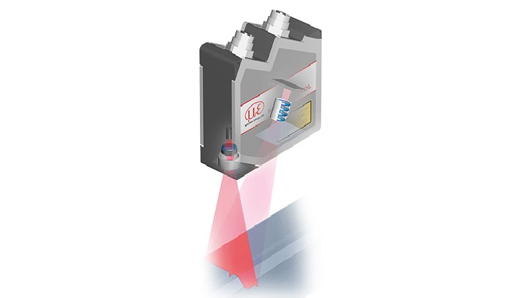
2D&3D激光轮廓仪(线激光)
激光轮廓仪也可叫做轮廓传感器,采用激光三角反射原理,采集不同材质表面的二维轮廓信息,通过特殊的透镜组,激光束被放大形成一条静态激光线投射到被测物体表面上,激光线在被测物体表面形成漫反射,反射光透过高质量光学系统,被投射到敏感感光矩阵上,除了传感器到被测表面的距离信息(Z轴),控制器还可以通过头像信息计算得出沿着激光线的位置信息(X轴)。以传感器为原心的二维坐标系内,轮廓仪测量出一组二维坐标值。移动被测物体或轮廓仪探头,就可以得到一组三维测量值。
测量时,高度敏感的感光元件CMOS矩阵可以接收从被测物体反射回来的光线,形成高精度轮廓影像。任何轮廓改变都会改变投射到被测物体表面的激光线的形状,从而改变感光器件矩阵上的影像结果。如果移动探头或者被测物体,可以得到若干扫描线轮廓,将这些轮廓合成就可以行成3D影像结果。这个影像也被称作“点云”,因为影像由数千个独立测量点所组成。

线激光应用范围

先进的技术,最高1280测量点每扫描线;测量频率最高4000扫描线/秒。
应用范围:
等高,间隙,外轮廓,厚度,高度,深度,边沿,凹槽,角度,圆度,平整度,变形等高精度测量。

激光与视觉融合的应用
应用说明:
1、视觉测量手机壳背部LOGO字母之间的尺寸,以及LOGO相对于手机壳整体的中心位置的偏差;
2、视觉测量手机壳背部LOGO的字符宽度;
3、激光测量手机壳背部LOGO的字符深度。
